Module AI_Patrol
AI -- Air Patrolling or Staging.
AI PATROL classes makes AI Controllables execute an Patrol.
There are the following types of PATROL classes defined:
- #AIPATROLZONE: Perform a PATROL in a zone.
Demo Missions
AI_PATROL Demo Missions source code
AI_PATROL Demo Missions, only for beta testers
ALL Demo Missions pack of the last release
YouTube Channel
AI_PATROL YouTube Channel
OPEN ISSUES
2017-01-17: When Spawned AI is located at an airbase, it will be routed first back to the airbase after take-off.
2016-01-17: -- Fixed problem with AI returning to base too early and unexpected. -- ReSpawning of AI will reset the AI_PATROL and derived classes. -- Checked the correct workings of SCHEDULER, and it DOES work correctly.
API CHANGE HISTORY
The underlying change log documents the API changes. Please read this carefully. The following notation is used:
- Added parts are expressed in bold type face.
- Removed parts are expressed in italic type face.
Hereby the change log:
2017-01-17: Rename of class: AI_PATROL_ZONE is the new name for the old AI_PATROLZONE.
2017-01-15: Complete revision. AIPATROLZONE is the base class for other AI_PATROL like classes.
2016-09-01: Initial class and API.
AUTHORS and CONTRIBUTIONS
Contributions:
- Dutch_Baron: Working together with James has resulted in the creation of the AI_BALANCER class. James has shared his ideas on balancing AI with air units, and together we made a first design which you can use now :-)
- Pikey: Testing and API concept review.
Authors:
- FlightControl: Design & Programming.
Global(s)
| AI_PATROL_ZONE |
AIPATROLZONE class, extends Fsm#FSM_CONTROLLABLEThe AIPATROLZONE class implements the core functions to patrol a Zone by an AI Controllable or Group. |
Type AI_PATROL_ZONE
Global(s)
- #AI_PATROL_ZONE AI_PATROL_ZONE
-
AIPATROLZONE class, extends Fsm#FSM_CONTROLLABLE
The AIPATROLZONE class implements the core functions to patrol a Zone by an AI Controllable or Group.
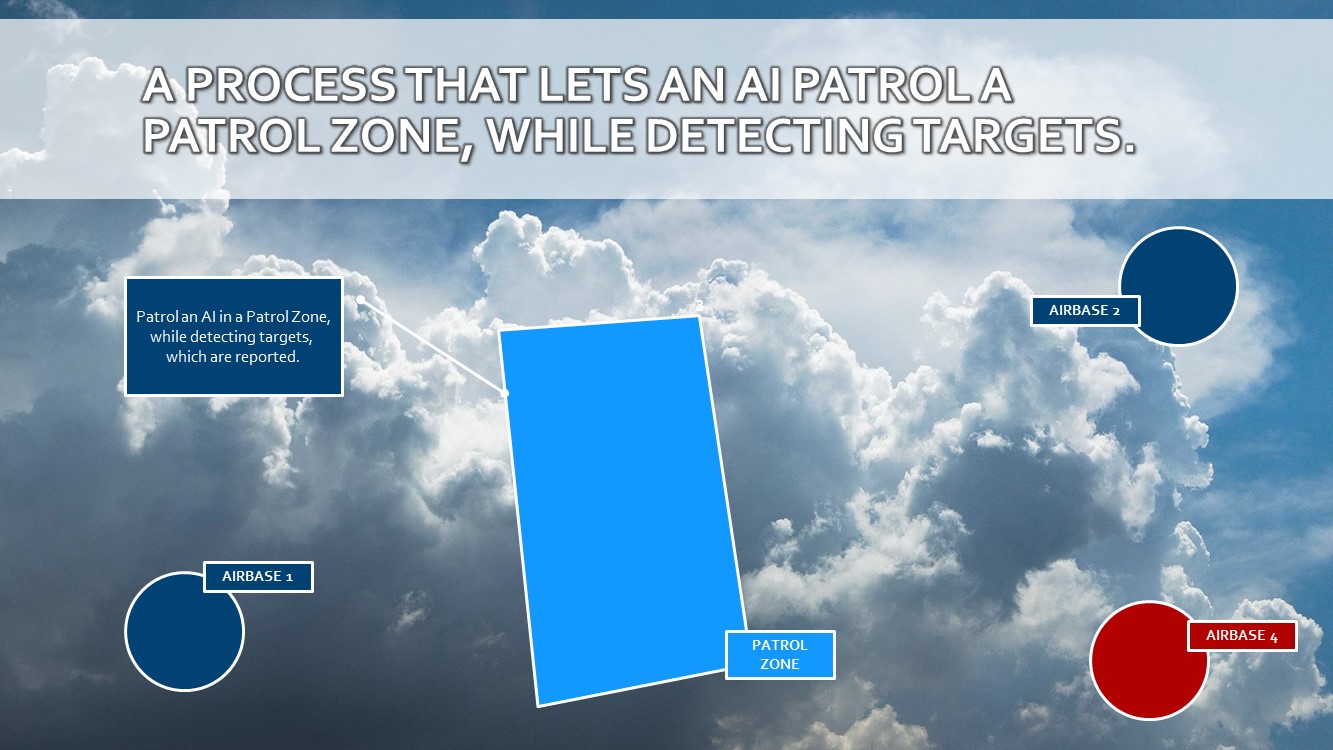
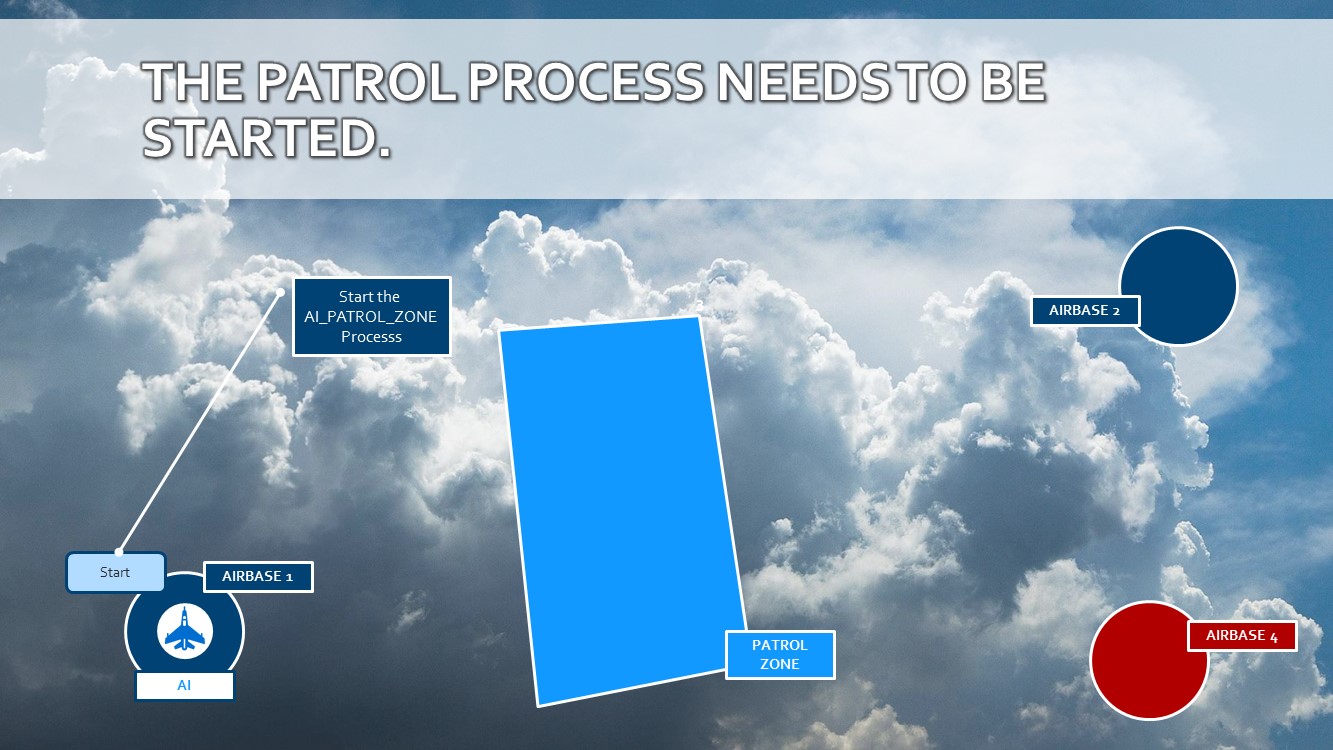
The AIPATROLZONE is assigned a Group and this must be done before the AIPATROLZONE process can be started using the Start event.
The AI will fly towards the random 3D point within the patrol zone, using a random speed within the given altitude and speed limits. Upon arrival at the 3D point, a new random 3D point will be selected within the patrol zone using the given limits.
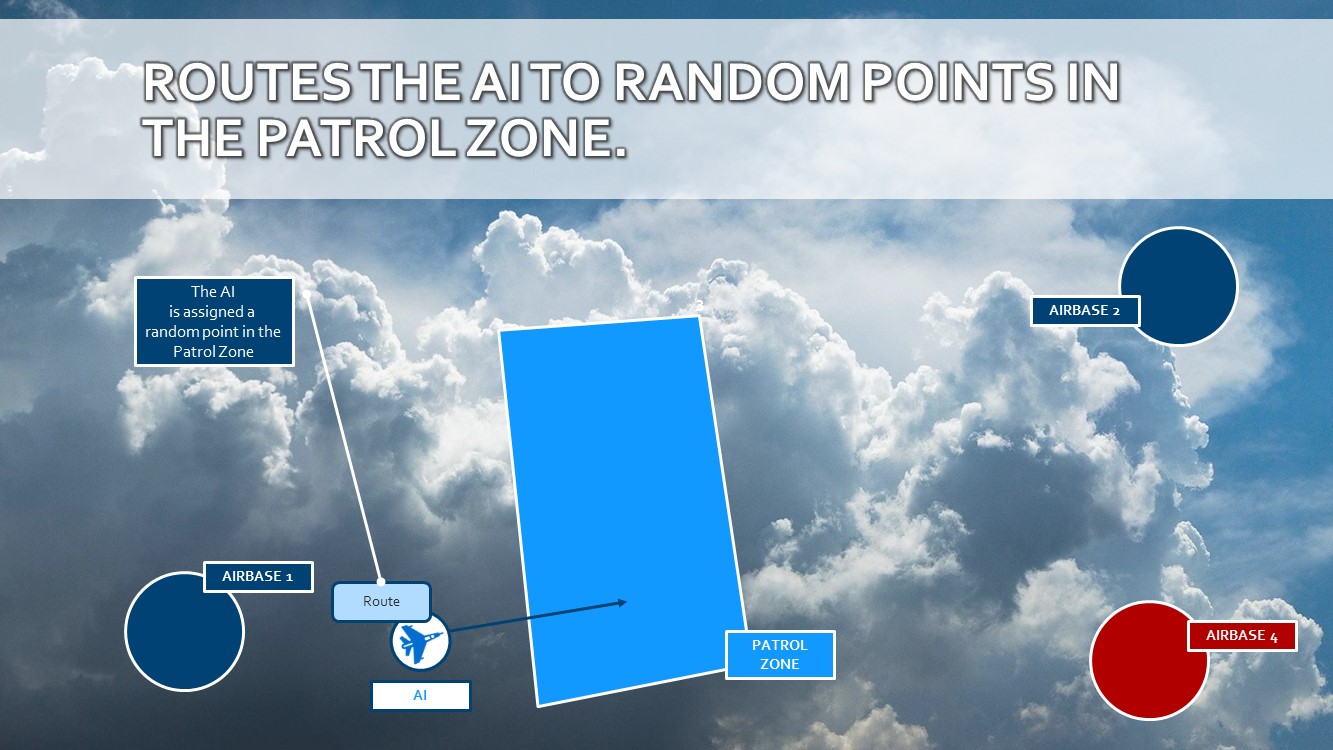
This cycle will continue.

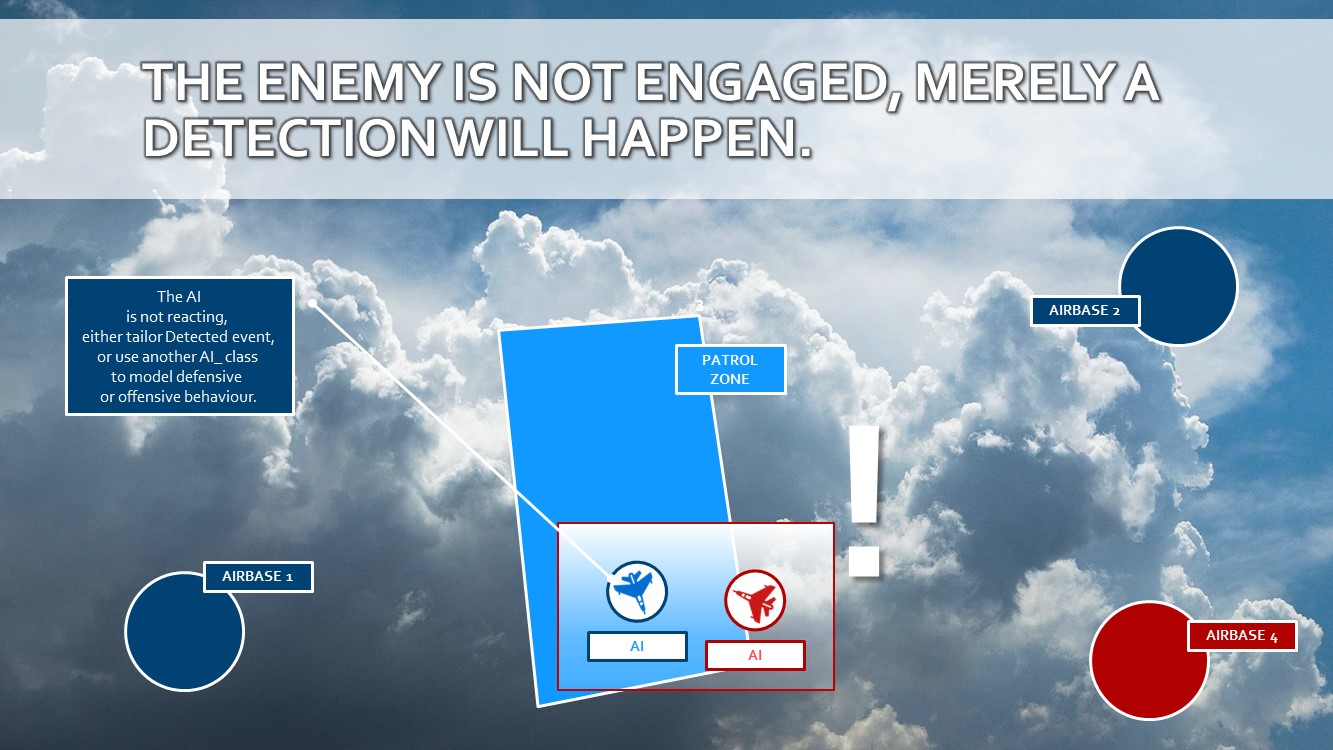
During the patrol, the AI will detect enemy targets, which are reported through the Detected event.
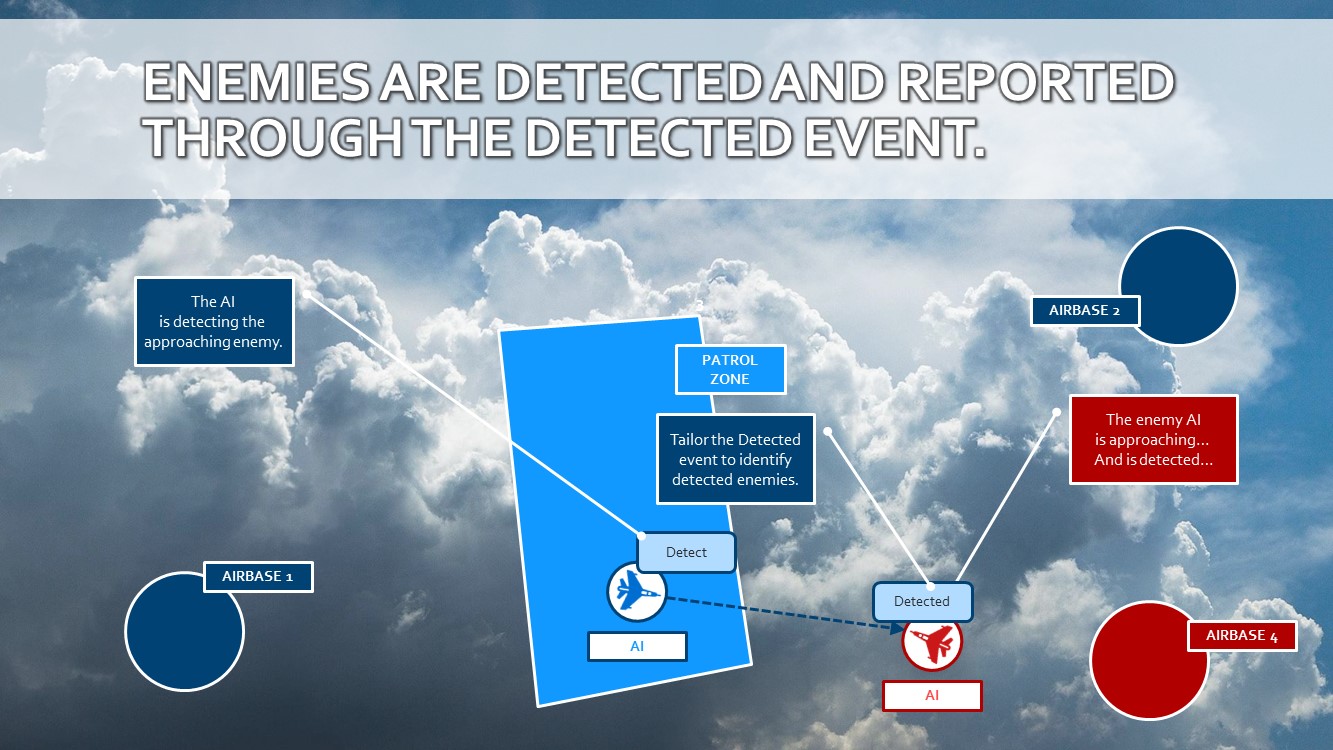
-- Note that the enemy is not engaged! To model enemy engagement, either tailor the Detected event, or use derived AI_ classes to model AI offensive or defensive behaviour.
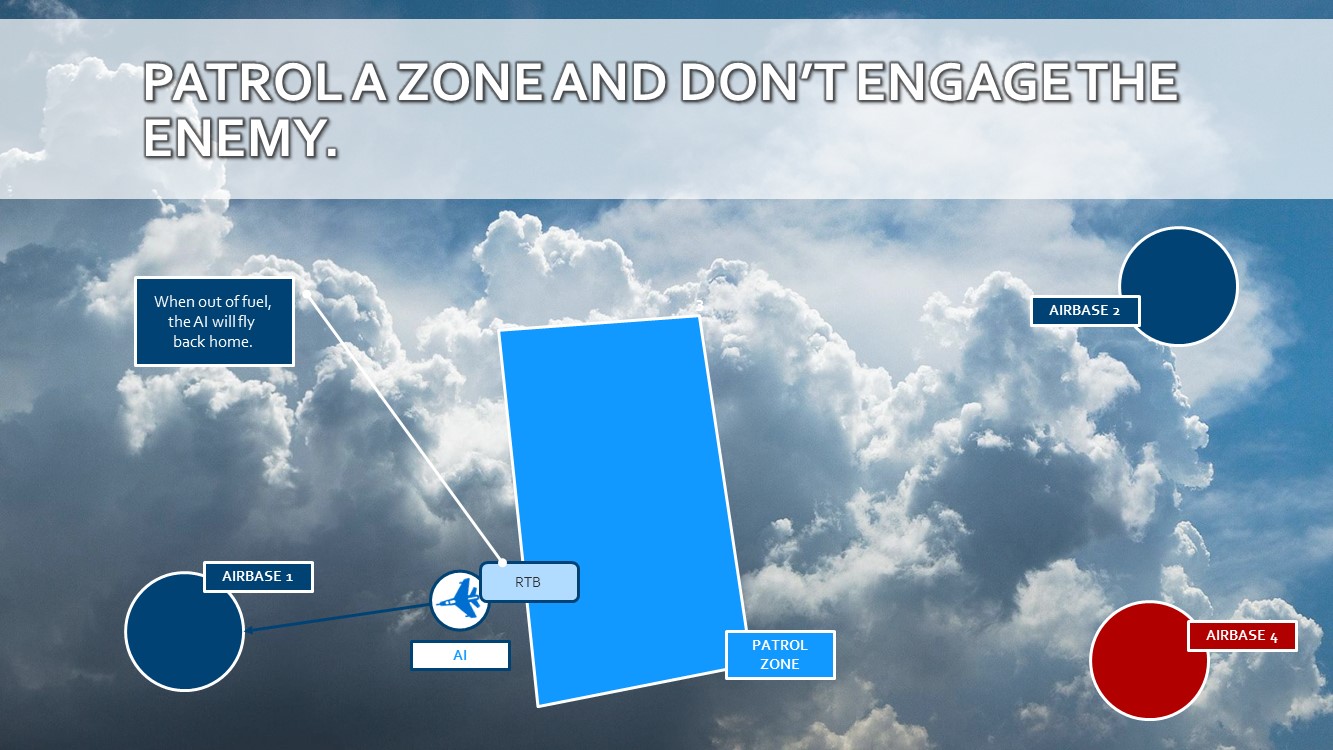
Until a fuel or damage treshold has been reached by the AI, or when the AI is commanded to RTB. When the fuel treshold has been reached, the airplane will fly towards the nearest friendly airbase and will land.
1. AIPATROLZONE constructor
- AIPATROLZONE.New(): Creates a new AIPATROLZONE object.
2. AIPATROLZONE is a FSM
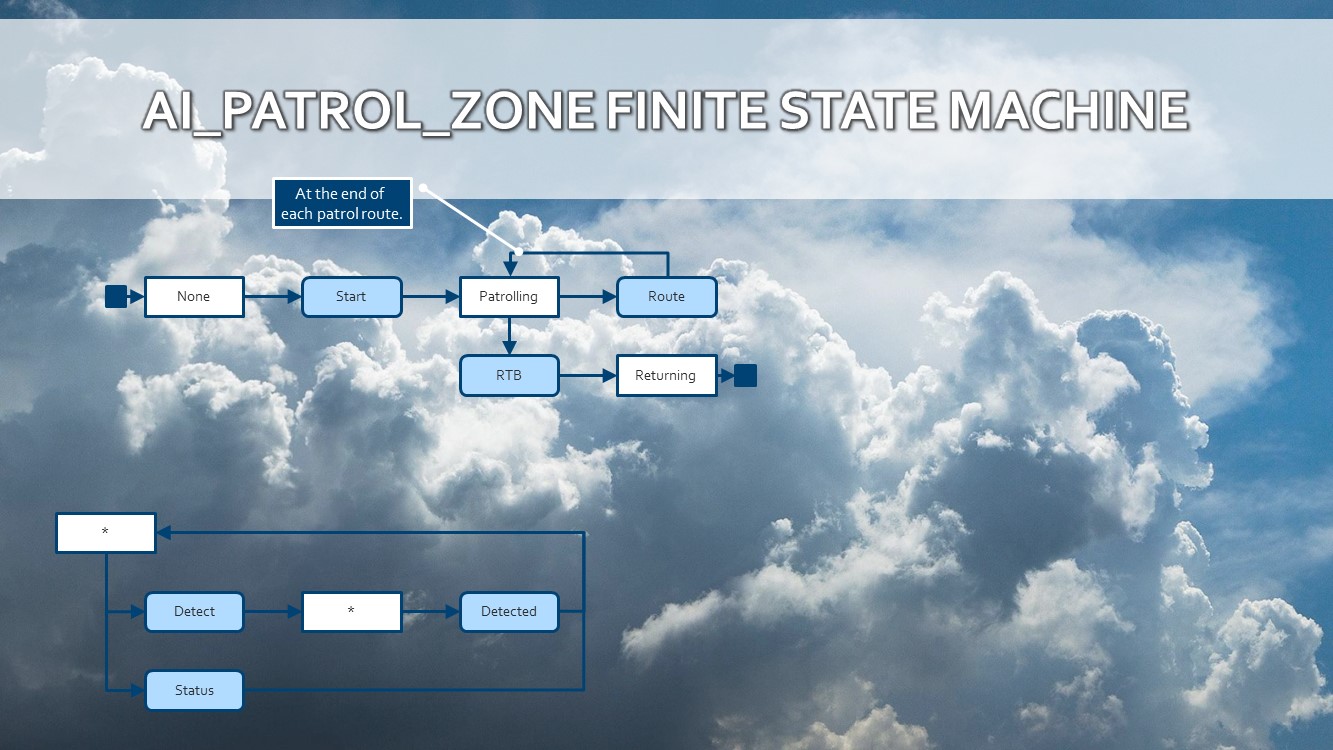
2.1. AIPATROLZONE States
- None ( Group ): The process is not started yet.
- Patrolling ( Group ): The AI is patrolling the Patrol Zone.
- Returning ( Group ): The AI is returning to Base.
- Stopped ( Group ): The process is stopped.
- Crashed ( Group ): The AI has crashed or is dead.
2.2. AIPATROLZONE Events
- Start ( Group ): Start the process.
- Stop ( Group ): Stop the process.
- Route ( Group ): Route the AI to a new random 3D point within the Patrol Zone.
- RTB ( Group ): Route the AI to the home base.
- Detect ( Group ): The AI is detecting targets.
- Detected ( Group ): The AI has detected new targets.
- Status ( Group ): The AI is checking status (fuel and damage). When the tresholds have been reached, the AI will RTB.
3. Set or Get the AI controllable
- AIPATROLZONE.SetControllable(): Set the AIControllable.
- AIPATROLZONE.GetControllable(): Get the AIControllable.
4. Set the Speed and Altitude boundaries of the AI controllable
- AIPATROLZONE.SetSpeed(): Set the patrol speed boundaries of the AI, for the next patrol.
- AIPATROLZONE.SetAltitude(): Set altitude boundaries of the AI, for the next patrol.
5. Manage the detection process of the AI controllable
The detection process of the AI controllable can be manipulated. Detection requires an amount of CPU power, which has an impact on your mission performance. Only put detection on when absolutely necessary, and the frequency of the detection can also be set.
- AIPATROLZONE.SetDetectionOn(): Set the detection on. The AI will detect for targets.
- AIPATROLZONE.SetDetectionOff(): Set the detection off, the AI will not detect for targets. The existing target list will NOT be erased.
The detection frequency can be set with AIPATROLZONE.SetDetectionInterval( seconds ), where the amount of seconds specify how much seconds will be waited before the next detection. Use the method AIPATROLZONE.GetDetectedUnits() to obtain a list of the Units detected by the AI.
The detection can be filtered to potential targets in a specific zone. Use the method AIPATROLZONE.SetDetectionZone() to set the zone where targets need to be detected. Note that when the zone is too far away, or the AI is not heading towards the zone, or the AI is too high, no targets may be detected according the weather conditions.
6. Manage the "out of fuel" in the AIPATROLZONE
When the AI is out of fuel, it is required that a new AI is started, before the old AI can return to the home base. Therefore, with a parameter and a calculation of the distance to the home base, the fuel treshold is calculated. When the fuel treshold is reached, the AI will continue for a given time its patrol task in orbit, while a new AI is targetted to the AIPATROLZONE. Once the time is finished, the old AI will return to the base. Use the method AIPATROLZONE.ManageFuel() to have this proces in place.
7. Manage "damage" behaviour of the AI in the AIPATROLZONE
When the AI is damaged, it is required that a new AIControllable is started. However, damage cannon be foreseen early on. Therefore, when the damage treshold is reached, the AI will return immediately to the home base (RTB). Use the method AIPATROLZONE.ManageDamage() to have this proces in place.
Type AI_Patrol
Type AI_PATROL_ZONE
AIPATROLZONE class
Field(s)
- #boolean AI_PATROL_ZONE.CheckStatus
- AI_PATROL_ZONE:ClearDetectedUnits()
-
Clears the list of Unit#UNITs that were detected by the AI.
- AI_PATROL_ZONE:Detect()
-
Synchronous Event Trigger for Event Detect.
- #boolean AI_PATROL_ZONE.DetectActivated
- #boolean AI_PATROL_ZONE.DetectOn
- AI_PATROL_ZONE:Detected()
-
Synchronous Event Trigger for Event Detected.
- AI_PATROL_ZONE.DetectedUnits
-
This table contains the targets detected during patrol.
- AI_PATROL_ZONE:GetDetectedUnits()
-
Gets a list of Unit#UNITs that were detected by the AI.
No filtering is applied, so, ANY detected UNIT can be in this list. It is up to the mission designer to use the Unit class and methods to filter the targets.
Return value
#table: The list of Unit#UNITs
- AI_PATROL_ZONE:ManageDamage(PatrolDamageTreshold)
-
When the AI is damaged beyond a certain treshold, it is required that the AI returns to the home base.
However, damage cannot be foreseen early on. Therefore, when the damage treshold is reached, the AI will return immediately to the home base (RTB). Note that for groups, the average damage of the complete group will be calculated. So, in a group of 4 airplanes, 2 lost and 2 with damage 0.2, the damage treshold will be 0.25.
Parameter
-
#number PatrolDamageTreshold: The treshold in percentage (between 0 and 1) when the AI is considered to be damaged.
Return value
#AIPATROLZONE: self
-
- AI_PATROL_ZONE:ManageFuel(PatrolFuelTresholdPercentage, PatrolOutOfFuelOrbitTime)
-
When the AI is out of fuel, it is required that a new AI is started, before the old AI can return to the home base.
Therefore, with a parameter and a calculation of the distance to the home base, the fuel treshold is calculated. When the fuel treshold is reached, the AI will continue for a given time its patrol task in orbit, while a new AIControllable is targetted to the AIPATROLZONE. Once the time is finished, the old AI will return to the base.
Parameters
-
#number PatrolFuelTresholdPercentage: The treshold in percentage (between 0 and 1) when the AIControllable is considered to get out of fuel. -
#number PatrolOutOfFuelOrbitTime: The amount of seconds the out of fuel AIControllable will orbit before returning to the base.
Return value
#AIPATROLZONE: self
-
- AI_PATROL_ZONE:New(PatrolZone, PatrolFloorAltitude, PatrolCeilingAltitude, PatrolMinSpeed, PatrolMaxSpeed, PatrolAltType)
-
Creates a new AIPATROLZONE object
Parameters
-
Core.Zone#ZONE_BASE PatrolZone: The Zone where the patrol needs to be executed. -
Dcs.DCSTypes#Altitude PatrolFloorAltitude: The lowest altitude in meters where to execute the patrol. -
Dcs.DCSTypes#Altitude PatrolCeilingAltitude: The highest altitude in meters where to execute the patrol. -
Dcs.DCSTypes#Speed PatrolMinSpeed: The minimum speed of the Controllable in km/h. -
Dcs.DCSTypes#Speed PatrolMaxSpeed: The maximum speed of the Controllable in km/h. -
Dcs.DCSTypes#AltitudeType PatrolAltType: The altitude type ("RADIO"=="AGL", "BARO"=="ASL"). Defaults to RADIO
Return value
#AIPATROLZONE: self
Usage:
-- Define a new AI_PATROL_ZONE Object. This PatrolArea will patrol an AIControllable within PatrolZone between 3000 and 6000 meters, with a variying speed between 600 and 900 km/h. PatrolZone = ZONE:New( 'PatrolZone' ) PatrolSpawn = SPAWN:New( 'Patrol Group' ) PatrolArea = AI_PATROL_ZONE:New( PatrolZone, 3000, 6000, 600, 900 ) -
- AI_PATROL_ZONE:OnAfterDetect(Controllable, From, Event, To)
-
OnAfter Transition Handler for Event Detect.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnAfterDetected(Controllable, From, Event, To)
-
OnAfter Transition Handler for Event Detected.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnAfterRTB(Controllable, From, Event, To)
-
OnAfter Transition Handler for Event RTB.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnAfterRoute(Controllable, From, Event, To)
-
OnAfter Transition Handler for Event Route.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnAfterStart(Controllable, From, Event, To)
-
OnAfter Transition Handler for Event Start.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnAfterStatus(Controllable, From, Event, To)
-
OnAfter Transition Handler for Event Status.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnAfterStop(Controllable, From, Event, To)
-
OnAfter Transition Handler for Event Stop.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnBeforeDetect(Controllable, From, Event, To)
-
OnBefore Transition Handler for Event Detect.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnBeforeDetected(Controllable, From, Event, To)
-
OnBefore Transition Handler for Event Detected.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnBeforeRTB(Controllable, From, Event, To)
-
OnBefore Transition Handler for Event RTB.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnBeforeRoute(Controllable, From, Event, To)
-
OnBefore Transition Handler for Event Route.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnBeforeStart(Controllable, From, Event, To)
-
OnBefore Transition Handler for Event Start.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnBeforeStatus(Controllable, From, Event, To)
-
OnBefore Transition Handler for Event Status.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnBeforeStop(Controllable, From, Event, To)
-
OnBefore Transition Handler for Event Stop.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnCrash(EventData)
-
Parameter
-
Core.Event#EVENTDATA EventData:
-
- AI_PATROL_ZONE:OnEjection(EventData)
-
Parameter
-
Core.Event#EVENTDATA EventData:
-
- AI_PATROL_ZONE:OnEnterPatrolling(Controllable, From, Event, To)
-
OnEnter Transition Handler for State Patrolling.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnEnterReturning(Controllable, From, Event, To)
-
OnEnter Transition Handler for State Returning.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnEnterStopped(Controllable, From, Event, To)
-
OnEnter Transition Handler for State Stopped.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:OnLeavePatrolling(Controllable, From, Event, To)
-
OnLeave Transition Handler for State Patrolling.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnLeaveReturning(Controllable, From, Event, To)
-
OnLeave Transition Handler for State Returning.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnLeaveStopped(Controllable, From, Event, To)
-
OnLeave Transition Handler for State Stopped.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#boolean: Return false to cancel Transition.
-
- AI_PATROL_ZONE:OnPilotDead(EventData)
-
Parameter
-
Core.Event#EVENTDATA EventData:
-
- AI_PATROL_ZONE.PatrolAltType
-
defafult PatrolAltType to "RADIO" if not specified
- Dcs.DCSTypes#Altitude AI_PATROL_ZONE.PatrolCeilingAltitude
-
The highest altitude in meters where to execute the patrol.
- Dcs.DCSTypes#Altitude AI_PATROL_ZONE.PatrolFloorAltitude
-
The lowest altitude in meters where to execute the patrol.
- #boolean AI_PATROL_ZONE.PatrolManageDamage
- #boolean AI_PATROL_ZONE.PatrolManageFuel
- Dcs.DCSTypes#Speed AI_PATROL_ZONE.PatrolMaxSpeed
-
The maximum speed of the Controllable in km/h.
- Dcs.DCSTypes#Speed AI_PATROL_ZONE.PatrolMinSpeed
-
The minimum speed of the Controllable in km/h.
- Core.Zone#ZONE_BASE AI_PATROL_ZONE.PatrolZone
-
The Zone where the patrol needs to be executed.
- AI_PATROL_ZONE:RTB()
-
Synchronous Event Trigger for Event RTB.
- AI_PATROL_ZONE:Route()
-
Synchronous Event Trigger for Event Route.
- AI_PATROL_ZONE:SetAltitude(PatrolFloorAltitude, PatrolCeilingAltitude)
-
Sets the floor and ceiling altitude of the patrol.
Parameters
-
Dcs.DCSTypes#Altitude PatrolFloorAltitude: The lowest altitude in meters where to execute the patrol. -
Dcs.DCSTypes#Altitude PatrolCeilingAltitude: The highest altitude in meters where to execute the patrol.
Return value
#AIPATROLZONE: self
-
- AI_PATROL_ZONE:SetDetectionActivated()
-
Activate the detection.
The AI will detect for targets if the Detection is switched On.
Return value
#AIPATROLZONE: self
- AI_PATROL_ZONE:SetDetectionDeactivated()
-
Deactivate the detection.
The AI will NOT detect for targets.
Return value
#AIPATROLZONE: self
- AI_PATROL_ZONE:SetDetectionInterval(Seconds)
-
Set the interval in seconds between each detection executed by the AI.
The list of already detected targets will be kept and updated. Newly detected targets will be added, but already detected targets that were not detected in this cycle, will NOT be removed! The default interval is 30 seconds.
Parameter
-
#number Seconds: The interval in seconds.
Return value
#AIPATROLZONE: self
-
- AI_PATROL_ZONE:SetDetectionOff()
-
Set the detection off.
The AI will NOT detect for targets. However, the list of already detected targets will be kept and can be enquired!
Return value
#AIPATROLZONE: self
- AI_PATROL_ZONE:SetDetectionOn()
-
Set the detection on.
The AI will detect for targets.
Return value
#AIPATROLZONE: self
- AI_PATROL_ZONE:SetDetectionZone(DetectionZone)
-
Set the detection zone where the AI is detecting targets.
Parameter
-
Core.Zone#ZONE DetectionZone: The zone where to detect targets.
Return value
#AIPATROLZONE: self
-
- AI_PATROL_ZONE:SetSpeed(PatrolMinSpeed, PatrolMaxSpeed)
-
Sets (modifies) the minimum and maximum speed of the patrol.
Parameters
-
Dcs.DCSTypes#Speed PatrolMinSpeed: The minimum speed of the Controllable in km/h. -
Dcs.DCSTypes#Speed PatrolMaxSpeed: The maximum speed of the Controllable in km/h.
Return value
#AIPATROLZONE: self
-
- AI_PATROL_ZONE:SetStatusOff()
-
Set the status checking off.
Return value
#AIPATROLZONE: self
- AI_PATROL_ZONE:Start()
-
Synchronous Event Trigger for Event Start.
- AI_PATROL_ZONE:Status()
-
Synchronous Event Trigger for Event Status.
- AI_PATROL_ZONE:Stop()
-
Synchronous Event Trigger for Event Stop.
- AI_PATROL_ZONE._NewPatrolRoute(AIControllable, self)
-
Parameters
-
Wrapper.Controllable#CONTROLLABLE AIControllable: This statis method is called from the route path within the last task at the last waaypoint of the Controllable. Note that this method is required, as triggers the next route when patrolling for the Controllable. -
self:
-
- AI_PATROL_ZONE:__Detect(Delay)
-
Asynchronous Event Trigger for Event Detect.
Parameter
-
#number Delay: The delay in seconds.
-
- AI_PATROL_ZONE:__Detected(Delay)
-
Asynchronous Event Trigger for Event Detected.
Parameter
-
#number Delay: The delay in seconds.
-
- AI_PATROL_ZONE:__RTB(Delay)
-
Asynchronous Event Trigger for Event RTB.
Parameter
-
#number Delay: The delay in seconds.
-
- AI_PATROL_ZONE:__Route(Delay)
-
Asynchronous Event Trigger for Event Route.
Parameter
-
#number Delay: The delay in seconds.
-
- AI_PATROL_ZONE:__Start(Delay)
-
Asynchronous Event Trigger for Event Start.
Parameter
-
#number Delay: The delay in seconds.
-
- AI_PATROL_ZONE:__Status(Delay)
-
Asynchronous Event Trigger for Event Status.
Parameter
-
#number Delay: The delay in seconds.
-
- AI_PATROL_ZONE:__Stop(Delay)
-
Asynchronous Event Trigger for Event Stop.
Parameter
-
#number Delay: The delay in seconds.
-
- AI_PATROL_ZONE:onafterDetect(Controllable, From, Event, To)
-
Parameters
-
Controllable: -
From: -
Event: -
To:
-
- AI_PATROL_ZONE:onafterRoute(Controllable, From, Event, To)
-
Defines a new patrol route using the Process_PatrolZone parameters and settings.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
-
- AI_PATROL_ZONE:onafterStart(Controllable, From, Event, To)
-
Defines a new patrol route using the Process_PatrolZone parameters and settings.
Parameters
-
Wrapper.Controllable#CONTROLLABLE Controllable: The Controllable Object managed by the FSM. -
#string From: The From State string. -
#string Event: The Event string. -
#string To: The To State string.
Return value
#AIPATROLZONE: self
-
- AI_PATROL_ZONE:onbeforeDetect(Controllable, From, Event, To)
-
Parameters
-
Controllable: -
From: -
Event: -
To:
-