mirror of
https://github.com/dcs-retribution/dcs-retribution.git
synced 2025-11-10 15:41:24 +00:00
This PR allows campaign creators to incorporate map objects (referred to as Scenery in the code) into their Liberation campaign. Map objects are defined using white trigger zones created by right clicking on scenery and clicking `assign as...`. Objective groups are defined by creating a blue TriggerZone surrounding the centers of the white trigger zones. The type of objective is determined by the campaign creator, assigning the value of the first property of the blue TriggerZone with the objective type. Map objects maintain their visually dead state by assigning a `Mission Start` `Scenery Object Dead` trigger to the trigger zone. It is important for the Liberation generated TriggerZone to be as small as possible so that no other scenery is marked dead by DCS. TriggerZones are hidden during gameplay (DCS behavior. I don't know if it's possible to turn that off.) TriggerZones are visible in the mission editor and mission planner however. If a player is using an older plane, it is important for them to remember where the target is. In the mission planner, the trigger zones' will be blue or red depending on which faction the map objects belong to. Inherent Resolve campaign has been modified to integrate scenery objects. ### **Limitations:** - Objective definitions (Any Blue TriggerZones) in campaign definition cannot overlap. - Map object deaths in `state.json` is tracking integers. You won't know what died until debriefing. - No images for the various buildings. In theory it can be done, but an unreasonable amount of work. - Every blue trigger zone must have a unique name. (If you let DCS auto increment the names this is not a concern. - No output to screen when scenery object is dead. You can see the building drawn as dead in the F10 map though. ### **Pictures:** An objective: 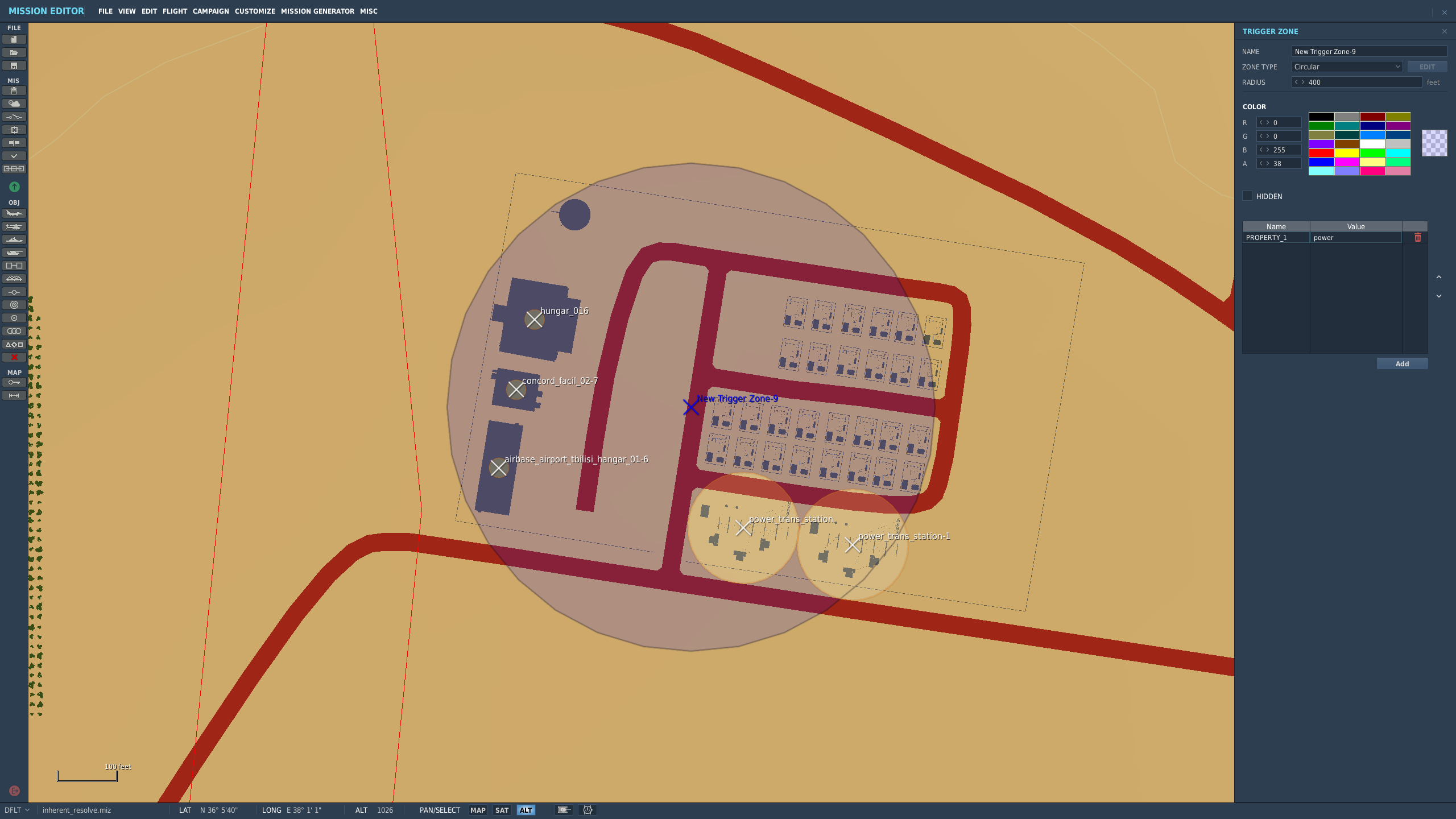 How the objective looks once in the mission planner/editor. This objective belongs to the enemy faction: 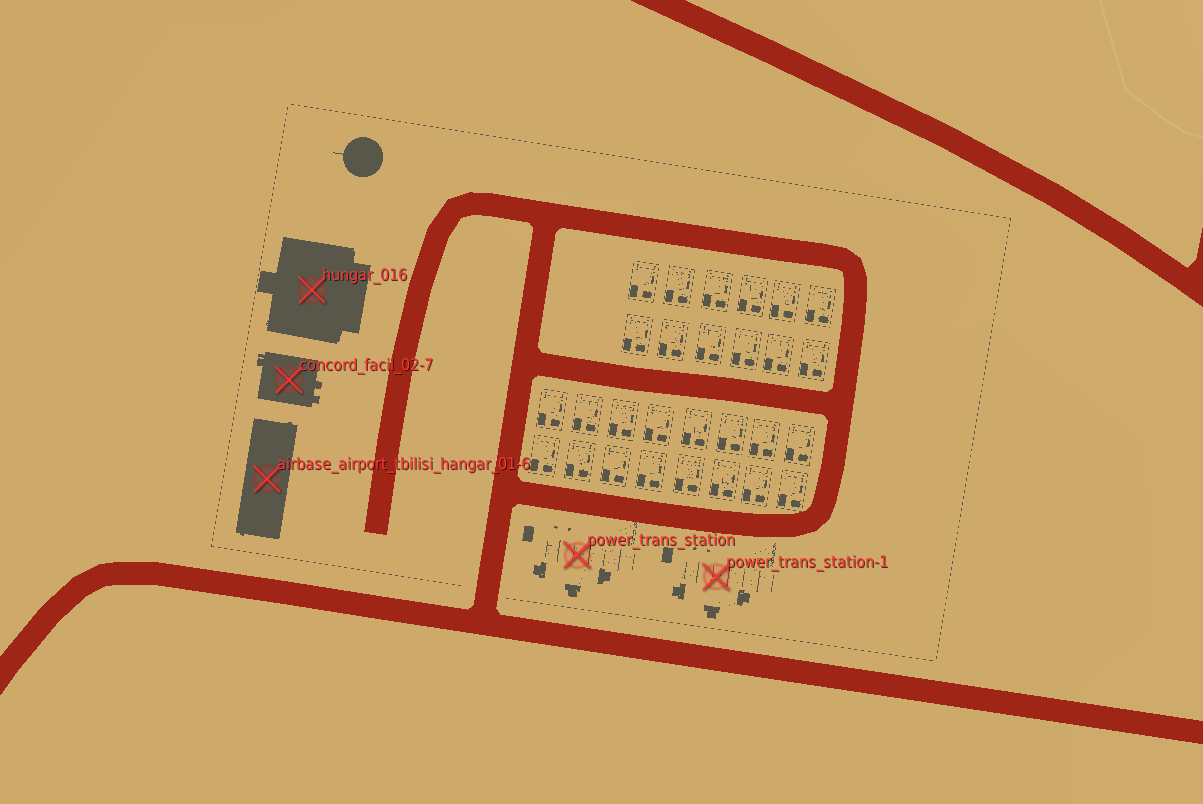
{kind=link}
{kind=link}
843 lines
29 KiB
Python
843 lines
29 KiB
Python
from __future__ import annotations
|
|
|
|
import itertools
|
|
import logging
|
|
import math
|
|
from dataclasses import dataclass
|
|
from functools import cached_property
|
|
from pathlib import Path
|
|
from typing import Any, Dict, Iterator, List, Optional, Tuple
|
|
|
|
from dcs import Mission
|
|
from dcs.countries import (
|
|
CombinedJointTaskForcesBlue,
|
|
CombinedJointTaskForcesRed,
|
|
)
|
|
from dcs.country import Country
|
|
from dcs.mapping import Point
|
|
from dcs.planes import F_15C
|
|
from dcs.ships import (
|
|
Bulker_Handy_Wind,
|
|
CVN_74_John_C__Stennis,
|
|
DDG_Arleigh_Burke_IIa,
|
|
LHA_1_Tarawa,
|
|
)
|
|
from dcs.statics import Fortification
|
|
from dcs.terrain import (
|
|
caucasus,
|
|
nevada,
|
|
normandy,
|
|
persiangulf,
|
|
syria,
|
|
thechannel,
|
|
)
|
|
from dcs.terrain.terrain import Airport, Terrain
|
|
from dcs.unitgroup import (
|
|
FlyingGroup,
|
|
Group,
|
|
ShipGroup,
|
|
StaticGroup,
|
|
VehicleGroup,
|
|
)
|
|
from dcs.vehicles import AirDefence, Armor, MissilesSS, Unarmed
|
|
from dcs.triggers import Triggers
|
|
from dcs.triggers import TriggerZone
|
|
|
|
from ..scenery_group import SceneryGroup
|
|
from pyproj import CRS, Transformer
|
|
from shapely import geometry, ops
|
|
|
|
from .controlpoint import (
|
|
Airfield,
|
|
Carrier,
|
|
ControlPoint,
|
|
Fob,
|
|
Lha,
|
|
MissionTarget,
|
|
OffMapSpawn,
|
|
)
|
|
from .frontline import FrontLine
|
|
from .landmap import Landmap, load_landmap, poly_contains
|
|
from .projections import TransverseMercator
|
|
from ..point_with_heading import PointWithHeading
|
|
from ..profiling import logged_duration
|
|
from ..utils import Distance, meters, nautical_miles
|
|
|
|
SIZE_TINY = 150
|
|
SIZE_SMALL = 600
|
|
SIZE_REGULAR = 1000
|
|
SIZE_BIG = 2000
|
|
SIZE_LARGE = 3000
|
|
|
|
IMPORTANCE_LOW = 1
|
|
IMPORTANCE_MEDIUM = 1.2
|
|
IMPORTANCE_HIGH = 1.4
|
|
|
|
|
|
class MizCampaignLoader:
|
|
BLUE_COUNTRY = CombinedJointTaskForcesBlue()
|
|
RED_COUNTRY = CombinedJointTaskForcesRed()
|
|
|
|
OFF_MAP_UNIT_TYPE = F_15C.id
|
|
|
|
CV_UNIT_TYPE = CVN_74_John_C__Stennis.id
|
|
LHA_UNIT_TYPE = LHA_1_Tarawa.id
|
|
FRONT_LINE_UNIT_TYPE = Armor.APC_M113.id
|
|
SHIPPING_LANE_UNIT_TYPE = Bulker_Handy_Wind.id
|
|
|
|
FOB_UNIT_TYPE = Unarmed.Truck_SKP_11_Mobile_ATC.id
|
|
FARP_HELIPAD = "SINGLE_HELIPAD"
|
|
|
|
EWR_UNIT_TYPE = AirDefence.EWR_55G6.id
|
|
SAM_UNIT_TYPE = AirDefence.SAM_SA_10_S_300_Grumble_Big_Bird_SR.id
|
|
GARRISON_UNIT_TYPE = AirDefence.SAM_SA_19_Tunguska_Grison.id
|
|
OFFSHORE_STRIKE_TARGET_UNIT_TYPE = Fortification.Oil_platform.id
|
|
SHIP_UNIT_TYPE = DDG_Arleigh_Burke_IIa.id
|
|
MISSILE_SITE_UNIT_TYPE = MissilesSS.SSM_SS_1C_Scud_B.id
|
|
COASTAL_DEFENSE_UNIT_TYPE = MissilesSS.AShM_SS_N_2_Silkworm.id
|
|
|
|
# Multiple options for the required SAMs so campaign designers can more
|
|
# accurately see the coverage of their IADS for the expected type.
|
|
REQUIRED_LONG_RANGE_SAM_UNIT_TYPES = {
|
|
AirDefence.SAM_Patriot_LN.id,
|
|
AirDefence.SAM_SA_10_S_300_Grumble_TEL_C.id,
|
|
AirDefence.SAM_SA_10_S_300_Grumble_TEL_D.id,
|
|
}
|
|
|
|
REQUIRED_MEDIUM_RANGE_SAM_UNIT_TYPES = {
|
|
AirDefence.SAM_Hawk_LN_M192.id,
|
|
AirDefence.SAM_SA_2_S_75_Guideline_LN.id,
|
|
AirDefence.SAM_SA_3_S_125_Goa_LN.id,
|
|
}
|
|
|
|
REQUIRED_EWR_UNIT_TYPE = AirDefence.EWR_1L13.id
|
|
|
|
FACTORY_UNIT_TYPE = Fortification.Workshop_A.id
|
|
|
|
BASE_DEFENSE_RADIUS = nautical_miles(2)
|
|
|
|
def __init__(self, miz: Path, theater: ConflictTheater) -> None:
|
|
self.theater = theater
|
|
self.mission = Mission()
|
|
with logged_duration("Loading miz"):
|
|
self.mission.load_file(str(miz))
|
|
self.control_point_id = itertools.count(1000)
|
|
|
|
# If there are no red carriers there usually aren't red units. Make sure
|
|
# both countries are initialized so we don't have to deal with None.
|
|
if self.mission.country(self.BLUE_COUNTRY.name) is None:
|
|
self.mission.coalition["blue"].add_country(self.BLUE_COUNTRY)
|
|
if self.mission.country(self.RED_COUNTRY.name) is None:
|
|
self.mission.coalition["red"].add_country(self.RED_COUNTRY)
|
|
|
|
@staticmethod
|
|
def control_point_from_airport(airport: Airport) -> ControlPoint:
|
|
|
|
# The wiki says this is a legacy property and to just use regular.
|
|
size = SIZE_REGULAR
|
|
|
|
# The importance is taken from the periodicity of the airport's
|
|
# warehouse divided by 10. 30 is the default, and out of range (valid
|
|
# values are between 1.0 and 1.4). If it is used, pick the default
|
|
# importance.
|
|
if airport.periodicity == 30:
|
|
importance = IMPORTANCE_MEDIUM
|
|
else:
|
|
importance = airport.periodicity / 10
|
|
|
|
cp = Airfield(airport, size, importance)
|
|
cp.captured = airport.is_blue()
|
|
|
|
# Use the unlimited aircraft option to determine if an airfield should
|
|
# be owned by the player when the campaign is "inverted".
|
|
cp.captured_invert = airport.unlimited_aircrafts
|
|
|
|
return cp
|
|
|
|
def country(self, blue: bool) -> Country:
|
|
country = self.mission.country(
|
|
self.BLUE_COUNTRY.name if blue else self.RED_COUNTRY.name
|
|
)
|
|
# Should be guaranteed because we initialized them.
|
|
assert country
|
|
return country
|
|
|
|
@property
|
|
def blue(self) -> Country:
|
|
return self.country(blue=True)
|
|
|
|
@property
|
|
def red(self) -> Country:
|
|
return self.country(blue=False)
|
|
|
|
def off_map_spawns(self, blue: bool) -> Iterator[FlyingGroup]:
|
|
for group in self.country(blue).plane_group:
|
|
if group.units[0].type == self.OFF_MAP_UNIT_TYPE:
|
|
yield group
|
|
|
|
def carriers(self, blue: bool) -> Iterator[ShipGroup]:
|
|
for group in self.country(blue).ship_group:
|
|
if group.units[0].type == self.CV_UNIT_TYPE:
|
|
yield group
|
|
|
|
def lhas(self, blue: bool) -> Iterator[ShipGroup]:
|
|
for group in self.country(blue).ship_group:
|
|
if group.units[0].type == self.LHA_UNIT_TYPE:
|
|
yield group
|
|
|
|
def fobs(self, blue: bool) -> Iterator[VehicleGroup]:
|
|
for group in self.country(blue).vehicle_group:
|
|
if group.units[0].type == self.FOB_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def ships(self) -> Iterator[ShipGroup]:
|
|
for group in self.blue.ship_group:
|
|
if group.units[0].type == self.SHIP_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def ewrs(self) -> Iterator[VehicleGroup]:
|
|
for group in self.blue.vehicle_group:
|
|
if group.units[0].type == self.EWR_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def sams(self) -> Iterator[VehicleGroup]:
|
|
for group in self.blue.vehicle_group:
|
|
if group.units[0].type == self.SAM_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def garrisons(self) -> Iterator[VehicleGroup]:
|
|
for group in self.blue.vehicle_group:
|
|
if group.units[0].type == self.GARRISON_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def offshore_strike_targets(self) -> Iterator[StaticGroup]:
|
|
for group in self.blue.static_group:
|
|
if group.units[0].type == self.OFFSHORE_STRIKE_TARGET_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def missile_sites(self) -> Iterator[VehicleGroup]:
|
|
for group in self.blue.vehicle_group:
|
|
if group.units[0].type == self.MISSILE_SITE_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def coastal_defenses(self) -> Iterator[VehicleGroup]:
|
|
for group in self.blue.vehicle_group:
|
|
if group.units[0].type == self.COASTAL_DEFENSE_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def required_long_range_sams(self) -> Iterator[VehicleGroup]:
|
|
for group in self.red.vehicle_group:
|
|
if group.units[0].type in self.REQUIRED_LONG_RANGE_SAM_UNIT_TYPES:
|
|
yield group
|
|
|
|
@property
|
|
def required_medium_range_sams(self) -> Iterator[VehicleGroup]:
|
|
for group in self.red.vehicle_group:
|
|
if group.units[0].type in self.REQUIRED_MEDIUM_RANGE_SAM_UNIT_TYPES:
|
|
yield group
|
|
|
|
@property
|
|
def required_ewrs(self) -> Iterator[VehicleGroup]:
|
|
for group in self.red.vehicle_group:
|
|
if group.units[0].type in self.REQUIRED_EWR_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def helipads(self) -> Iterator[StaticGroup]:
|
|
for group in self.blue.static_group:
|
|
if group.units[0].type == self.FARP_HELIPAD:
|
|
yield group
|
|
|
|
@property
|
|
def factories(self) -> Iterator[StaticGroup]:
|
|
for group in self.blue.static_group:
|
|
if group.units[0].type in self.FACTORY_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def scenery(self) -> List[SceneryGroup]:
|
|
return SceneryGroup.from_trigger_zones(self.mission.triggers._zones)
|
|
|
|
@cached_property
|
|
def control_points(self) -> Dict[int, ControlPoint]:
|
|
control_points = {}
|
|
for airport in self.mission.terrain.airport_list():
|
|
if airport.is_blue() or airport.is_red():
|
|
control_point = self.control_point_from_airport(airport)
|
|
control_points[control_point.id] = control_point
|
|
|
|
for blue in (False, True):
|
|
for group in self.off_map_spawns(blue):
|
|
control_point = OffMapSpawn(
|
|
next(self.control_point_id), str(group.name), group.position
|
|
)
|
|
control_point.captured = blue
|
|
control_point.captured_invert = group.late_activation
|
|
control_points[control_point.id] = control_point
|
|
for group in self.carriers(blue):
|
|
# TODO: Name the carrier.
|
|
control_point = Carrier(
|
|
"carrier", group.position, next(self.control_point_id)
|
|
)
|
|
control_point.captured = blue
|
|
control_point.captured_invert = group.late_activation
|
|
control_points[control_point.id] = control_point
|
|
for group in self.lhas(blue):
|
|
# TODO: Name the LHA.db
|
|
control_point = Lha("lha", group.position, next(self.control_point_id))
|
|
control_point.captured = blue
|
|
control_point.captured_invert = group.late_activation
|
|
control_points[control_point.id] = control_point
|
|
for group in self.fobs(blue):
|
|
control_point = Fob(
|
|
str(group.name), group.position, next(self.control_point_id)
|
|
)
|
|
control_point.captured = blue
|
|
control_point.captured_invert = group.late_activation
|
|
control_points[control_point.id] = control_point
|
|
|
|
return control_points
|
|
|
|
@property
|
|
def front_line_path_groups(self) -> Iterator[VehicleGroup]:
|
|
for group in self.country(blue=True).vehicle_group:
|
|
if group.units[0].type == self.FRONT_LINE_UNIT_TYPE:
|
|
yield group
|
|
|
|
@property
|
|
def shipping_lane_groups(self) -> Iterator[ShipGroup]:
|
|
for group in self.country(blue=True).ship_group:
|
|
if group.units[0].type == self.SHIPPING_LANE_UNIT_TYPE:
|
|
yield group
|
|
|
|
def add_supply_routes(self) -> None:
|
|
for group in self.front_line_path_groups:
|
|
# The unit will have its first waypoint at the source CP and the final
|
|
# waypoint at the destination CP. Each waypoint defines the path of the
|
|
# cargo ship.
|
|
waypoints = [p.position for p in group.points]
|
|
origin = self.theater.closest_control_point(waypoints[0])
|
|
if origin is None:
|
|
raise RuntimeError(
|
|
f"No control point near the first waypoint of {group.name}"
|
|
)
|
|
destination = self.theater.closest_control_point(waypoints[-1])
|
|
if destination is None:
|
|
raise RuntimeError(
|
|
f"No control point near the final waypoint of {group.name}"
|
|
)
|
|
|
|
self.control_points[origin.id].create_convoy_route(destination, waypoints)
|
|
self.control_points[destination.id].create_convoy_route(
|
|
origin, list(reversed(waypoints))
|
|
)
|
|
|
|
def add_shipping_lanes(self) -> None:
|
|
for group in self.shipping_lane_groups:
|
|
# The unit will have its first waypoint at the source CP and the final
|
|
# waypoint at the destination CP. Each waypoint defines the path of the
|
|
# cargo ship.
|
|
waypoints = [p.position for p in group.points]
|
|
origin = self.theater.closest_control_point(waypoints[0])
|
|
if origin is None:
|
|
raise RuntimeError(
|
|
f"No control point near the first waypoint of {group.name}"
|
|
)
|
|
destination = self.theater.closest_control_point(waypoints[-1])
|
|
if destination is None:
|
|
raise RuntimeError(
|
|
f"No control point near the final waypoint of {group.name}"
|
|
)
|
|
|
|
self.control_points[origin.id].create_shipping_lane(destination, waypoints)
|
|
self.control_points[destination.id].create_shipping_lane(
|
|
origin, list(reversed(waypoints))
|
|
)
|
|
|
|
def objective_info(self, group: Group) -> Tuple[ControlPoint, Distance]:
|
|
closest = self.theater.closest_control_point(group.position)
|
|
distance = meters(closest.position.distance_to_point(group.position))
|
|
return closest, distance
|
|
|
|
def add_preset_locations(self) -> None:
|
|
for group in self.garrisons:
|
|
closest, distance = self.objective_info(group)
|
|
if distance < self.BASE_DEFENSE_RADIUS:
|
|
closest.preset_locations.base_garrisons.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
else:
|
|
logging.warning(f"Found garrison unit too far from base: {group.name}")
|
|
|
|
for group in self.sams:
|
|
closest, distance = self.objective_info(group)
|
|
if distance < self.BASE_DEFENSE_RADIUS:
|
|
closest.preset_locations.base_air_defense.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
else:
|
|
closest.preset_locations.strike_locations.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.ewrs:
|
|
closest, distance = self.objective_info(group)
|
|
if distance < self.BASE_DEFENSE_RADIUS:
|
|
closest.preset_locations.base_ewrs.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
else:
|
|
closest.preset_locations.ewrs.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.offshore_strike_targets:
|
|
closest, distance = self.objective_info(group)
|
|
closest.preset_locations.offshore_strike_locations.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.ships:
|
|
closest, distance = self.objective_info(group)
|
|
closest.preset_locations.ships.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.missile_sites:
|
|
closest, distance = self.objective_info(group)
|
|
closest.preset_locations.missile_sites.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.coastal_defenses:
|
|
closest, distance = self.objective_info(group)
|
|
closest.preset_locations.coastal_defenses.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.required_long_range_sams:
|
|
closest, distance = self.objective_info(group)
|
|
closest.preset_locations.required_long_range_sams.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.required_medium_range_sams:
|
|
closest, distance = self.objective_info(group)
|
|
closest.preset_locations.required_medium_range_sams.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.required_ewrs:
|
|
closest, distance = self.objective_info(group)
|
|
closest.preset_locations.required_ewrs.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.helipads:
|
|
closest, distance = self.objective_info(group)
|
|
closest.helipads.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.factories:
|
|
closest, distance = self.objective_info(group)
|
|
closest.preset_locations.factories.append(
|
|
PointWithHeading.from_point(group.position, group.units[0].heading)
|
|
)
|
|
|
|
for group in self.scenery:
|
|
closest, distance = self.objective_info(group)
|
|
closest.preset_locations.scenery.append(group)
|
|
|
|
def populate_theater(self) -> None:
|
|
for control_point in self.control_points.values():
|
|
self.theater.add_controlpoint(control_point)
|
|
self.add_preset_locations()
|
|
self.add_supply_routes()
|
|
self.add_shipping_lanes()
|
|
|
|
|
|
@dataclass
|
|
class ReferencePoint:
|
|
world_coordinates: Point
|
|
image_coordinates: Point
|
|
|
|
|
|
@dataclass(frozen=True)
|
|
class LatLon:
|
|
latitude: float
|
|
longitude: float
|
|
|
|
|
|
class ConflictTheater:
|
|
terrain: Terrain
|
|
|
|
reference_points: Tuple[ReferencePoint, ReferencePoint]
|
|
overview_image: str
|
|
landmap: Optional[Landmap]
|
|
"""
|
|
land_poly = None # type: Polygon
|
|
"""
|
|
daytime_map: Dict[str, Tuple[int, int]]
|
|
|
|
def __init__(self):
|
|
self.controlpoints: List[ControlPoint] = []
|
|
self.point_to_ll_transformer = Transformer.from_crs(
|
|
self.projection_parameters.to_crs(), CRS("WGS84")
|
|
)
|
|
self.ll_to_point_transformer = Transformer.from_crs(
|
|
CRS("WGS84"), self.projection_parameters.to_crs()
|
|
)
|
|
"""
|
|
self.land_poly = geometry.Polygon(self.landmap[0][0])
|
|
for x in self.landmap[1]:
|
|
self.land_poly = self.land_poly.difference(geometry.Polygon(x))
|
|
"""
|
|
|
|
def __getstate__(self) -> Dict[str, Any]:
|
|
state = self.__dict__.copy()
|
|
# Avoid persisting any volatile types that can be deterministically
|
|
# recomputed on load for the sake of save compatibility.
|
|
del state["point_to_ll_transformer"]
|
|
del state["ll_to_point_transformer"]
|
|
return state
|
|
|
|
def __setstate__(self, state: Dict[str, Any]) -> None:
|
|
self.__dict__.update(state)
|
|
# Regenerate any state that was not persisted.
|
|
self.point_to_ll_transformer = Transformer.from_crs(
|
|
self.projection_parameters.to_crs(), CRS("WGS84")
|
|
)
|
|
self.ll_to_point_transformer = Transformer.from_crs(
|
|
CRS("WGS84"), self.projection_parameters.to_crs()
|
|
)
|
|
|
|
def add_controlpoint(self, point: ControlPoint):
|
|
self.controlpoints.append(point)
|
|
|
|
def find_ground_objects_by_obj_name(self, obj_name):
|
|
found = []
|
|
for cp in self.controlpoints:
|
|
for g in cp.ground_objects:
|
|
if g.obj_name == obj_name:
|
|
found.append(g)
|
|
return found
|
|
|
|
def is_in_sea(self, point: Point) -> bool:
|
|
if not self.landmap:
|
|
return False
|
|
|
|
if self.is_on_land(point):
|
|
return False
|
|
|
|
for exclusion_zone in self.landmap.exclusion_zones:
|
|
if poly_contains(point.x, point.y, exclusion_zone):
|
|
return False
|
|
|
|
for sea in self.landmap.sea_zones:
|
|
if poly_contains(point.x, point.y, sea):
|
|
return True
|
|
|
|
return False
|
|
|
|
def is_on_land(self, point: Point) -> bool:
|
|
if not self.landmap:
|
|
return True
|
|
|
|
is_point_included = False
|
|
if poly_contains(point.x, point.y, self.landmap.inclusion_zones):
|
|
is_point_included = True
|
|
|
|
if not is_point_included:
|
|
return False
|
|
|
|
for exclusion_zone in self.landmap.exclusion_zones:
|
|
if poly_contains(point.x, point.y, exclusion_zone):
|
|
return False
|
|
|
|
return True
|
|
|
|
def nearest_land_pos(self, point: Point, extend_dist: int = 50) -> Point:
|
|
"""Returns the nearest point inside a land exclusion zone from point
|
|
`extend_dist` determines how far inside the zone the point should be placed"""
|
|
if self.is_on_land(point):
|
|
return point
|
|
point = geometry.Point(point.x, point.y)
|
|
nearest_points = []
|
|
if not self.landmap:
|
|
raise RuntimeError("Landmap not initialized")
|
|
for inclusion_zone in self.landmap.inclusion_zones:
|
|
nearest_pair = ops.nearest_points(point, inclusion_zone)
|
|
nearest_points.append(nearest_pair[1])
|
|
min_distance = point.distance(nearest_points[0]) # type: geometry.Point
|
|
nearest_point = nearest_points[0] # type: geometry.Point
|
|
for pt in nearest_points[1:]:
|
|
distance = point.distance(pt)
|
|
if distance < min_distance:
|
|
min_distance = distance
|
|
nearest_point = pt
|
|
assert isinstance(nearest_point, geometry.Point)
|
|
point = Point(point.x, point.y)
|
|
nearest_point = Point(nearest_point.x, nearest_point.y)
|
|
new_point = point.point_from_heading(
|
|
point.heading_between_point(nearest_point),
|
|
point.distance_to_point(nearest_point) + extend_dist,
|
|
)
|
|
return new_point
|
|
|
|
def control_points_for(self, player: bool) -> Iterator[ControlPoint]:
|
|
for point in self.controlpoints:
|
|
if point.captured == player:
|
|
yield point
|
|
|
|
def player_points(self) -> List[ControlPoint]:
|
|
return list(self.control_points_for(player=True))
|
|
|
|
def conflicts(self) -> Iterator[FrontLine]:
|
|
for player_cp in [x for x in self.controlpoints if x.captured]:
|
|
for enemy_cp in [
|
|
x for x in player_cp.connected_points if not x.is_friendly_to(player_cp)
|
|
]:
|
|
yield FrontLine(player_cp, enemy_cp)
|
|
|
|
def enemy_points(self) -> List[ControlPoint]:
|
|
return list(self.control_points_for(player=False))
|
|
|
|
def closest_control_point(self, point: Point) -> ControlPoint:
|
|
closest = self.controlpoints[0]
|
|
closest_distance = point.distance_to_point(closest.position)
|
|
for control_point in self.controlpoints[1:]:
|
|
distance = point.distance_to_point(control_point.position)
|
|
if distance < closest_distance:
|
|
closest = control_point
|
|
closest_distance = distance
|
|
return closest
|
|
|
|
def closest_target(self, point: Point) -> MissionTarget:
|
|
closest: MissionTarget = self.controlpoints[0]
|
|
closest_distance = point.distance_to_point(closest.position)
|
|
for control_point in self.controlpoints[1:]:
|
|
distance = point.distance_to_point(control_point.position)
|
|
if distance < closest_distance:
|
|
closest = control_point
|
|
closest_distance = distance
|
|
for tgo in control_point.ground_objects:
|
|
distance = point.distance_to_point(tgo.position)
|
|
if distance < closest_distance:
|
|
closest = tgo
|
|
closest_distance = distance
|
|
for conflict in self.conflicts():
|
|
distance = conflict.position.distance_to_point(point)
|
|
if distance < closest_distance:
|
|
closest = conflict
|
|
closest_distance = distance
|
|
return closest
|
|
|
|
def closest_opposing_control_points(self) -> Tuple[ControlPoint, ControlPoint]:
|
|
"""
|
|
Returns a tuple of the two nearest opposing ControlPoints in theater.
|
|
(player_cp, enemy_cp)
|
|
"""
|
|
seen = set()
|
|
min_distance = math.inf
|
|
closest_blue = None
|
|
closest_red = None
|
|
for blue_cp in self.player_points():
|
|
for red_cp in self.enemy_points():
|
|
if (blue_cp, red_cp) in seen:
|
|
continue
|
|
seen.add((blue_cp, red_cp))
|
|
seen.add((red_cp, blue_cp))
|
|
|
|
dist = red_cp.position.distance_to_point(blue_cp.position)
|
|
if dist < min_distance:
|
|
closest_red = red_cp
|
|
closest_blue = blue_cp
|
|
min_distance = dist
|
|
|
|
assert closest_blue is not None
|
|
assert closest_red is not None
|
|
return closest_blue, closest_red
|
|
|
|
def find_control_point_by_id(self, id: int) -> ControlPoint:
|
|
for i in self.controlpoints:
|
|
if i.id == id:
|
|
return i
|
|
raise KeyError(f"Cannot find ControlPoint with ID {id}")
|
|
|
|
@staticmethod
|
|
def from_json(directory: Path, data: Dict[str, Any]) -> ConflictTheater:
|
|
theaters = {
|
|
"Caucasus": CaucasusTheater,
|
|
"Nevada": NevadaTheater,
|
|
"Persian Gulf": PersianGulfTheater,
|
|
"Normandy": NormandyTheater,
|
|
"The Channel": TheChannelTheater,
|
|
"Syria": SyriaTheater,
|
|
}
|
|
theater = theaters[data["theater"]]
|
|
t = theater()
|
|
|
|
miz = data.get("miz", None)
|
|
if miz is None:
|
|
raise RuntimeError(
|
|
"Old format (non-miz) campaigns are no longer supported."
|
|
)
|
|
|
|
with logged_duration("Importing miz data"):
|
|
MizCampaignLoader(directory / miz, t).populate_theater()
|
|
return t
|
|
|
|
@property
|
|
def projection_parameters(self) -> TransverseMercator:
|
|
raise NotImplementedError
|
|
|
|
def point_to_ll(self, point: Point) -> LatLon:
|
|
lat, lon = self.point_to_ll_transformer.transform(point.x, point.y)
|
|
return LatLon(lat, lon)
|
|
|
|
def ll_to_point(self, ll: LatLon) -> Point:
|
|
x, y = self.ll_to_point_transformer.transform(ll.latitude, ll.longitude)
|
|
return Point(x, y)
|
|
|
|
|
|
class CaucasusTheater(ConflictTheater):
|
|
terrain = caucasus.Caucasus()
|
|
overview_image = "caumap.gif"
|
|
reference_points = (
|
|
ReferencePoint(caucasus.Gelendzhik.position, Point(176, 298)),
|
|
ReferencePoint(caucasus.Batumi.position, Point(1307, 1205)),
|
|
)
|
|
|
|
landmap = load_landmap("resources\\caulandmap.p")
|
|
daytime_map = {
|
|
"dawn": (6, 9),
|
|
"day": (9, 18),
|
|
"dusk": (18, 20),
|
|
"night": (0, 5),
|
|
}
|
|
|
|
@property
|
|
def projection_parameters(self) -> TransverseMercator:
|
|
from .caucasus import PARAMETERS
|
|
|
|
return PARAMETERS
|
|
|
|
|
|
class PersianGulfTheater(ConflictTheater):
|
|
terrain = persiangulf.PersianGulf()
|
|
overview_image = "persiangulf.gif"
|
|
reference_points = (
|
|
ReferencePoint(persiangulf.Jiroft.position, Point(1692, 1343)),
|
|
ReferencePoint(persiangulf.Liwa_AFB.position, Point(358, 3238)),
|
|
)
|
|
landmap = load_landmap("resources\\gulflandmap.p")
|
|
daytime_map = {
|
|
"dawn": (6, 8),
|
|
"day": (8, 16),
|
|
"dusk": (16, 18),
|
|
"night": (0, 5),
|
|
}
|
|
|
|
@property
|
|
def projection_parameters(self) -> TransverseMercator:
|
|
from .persiangulf import PARAMETERS
|
|
|
|
return PARAMETERS
|
|
|
|
|
|
class NevadaTheater(ConflictTheater):
|
|
terrain = nevada.Nevada()
|
|
overview_image = "nevada.gif"
|
|
reference_points = (
|
|
ReferencePoint(nevada.Mina_Airport_3Q0.position, Point(252, 295)),
|
|
ReferencePoint(nevada.Laughlin_Airport.position, Point(844, 909)),
|
|
)
|
|
landmap = load_landmap("resources\\nevlandmap.p")
|
|
daytime_map = {
|
|
"dawn": (4, 6),
|
|
"day": (6, 17),
|
|
"dusk": (17, 18),
|
|
"night": (0, 5),
|
|
}
|
|
|
|
@property
|
|
def projection_parameters(self) -> TransverseMercator:
|
|
from .nevada import PARAMETERS
|
|
|
|
return PARAMETERS
|
|
|
|
|
|
class NormandyTheater(ConflictTheater):
|
|
terrain = normandy.Normandy()
|
|
overview_image = "normandy.gif"
|
|
reference_points = (
|
|
ReferencePoint(normandy.Needs_Oar_Point.position, Point(515, 329)),
|
|
ReferencePoint(normandy.Evreux.position, Point(2029, 1709)),
|
|
)
|
|
landmap = load_landmap("resources\\normandylandmap.p")
|
|
daytime_map = {
|
|
"dawn": (6, 8),
|
|
"day": (10, 17),
|
|
"dusk": (17, 18),
|
|
"night": (0, 5),
|
|
}
|
|
|
|
@property
|
|
def projection_parameters(self) -> TransverseMercator:
|
|
from .normandy import PARAMETERS
|
|
|
|
return PARAMETERS
|
|
|
|
|
|
class TheChannelTheater(ConflictTheater):
|
|
terrain = thechannel.TheChannel()
|
|
overview_image = "thechannel.gif"
|
|
reference_points = (
|
|
ReferencePoint(thechannel.Abbeville_Drucat.position, Point(2005, 2390)),
|
|
ReferencePoint(thechannel.Detling.position, Point(706, 382)),
|
|
)
|
|
landmap = load_landmap("resources\\channellandmap.p")
|
|
daytime_map = {
|
|
"dawn": (6, 8),
|
|
"day": (10, 17),
|
|
"dusk": (17, 18),
|
|
"night": (0, 5),
|
|
}
|
|
|
|
@property
|
|
def projection_parameters(self) -> TransverseMercator:
|
|
from .thechannel import PARAMETERS
|
|
|
|
return PARAMETERS
|
|
|
|
|
|
class SyriaTheater(ConflictTheater):
|
|
terrain = syria.Syria()
|
|
overview_image = "syria.gif"
|
|
reference_points = (
|
|
ReferencePoint(syria.Eyn_Shemer.position, Point(564, 1289)),
|
|
ReferencePoint(syria.Tabqa.position, Point(1329, 491)),
|
|
)
|
|
landmap = load_landmap("resources\\syrialandmap.p")
|
|
daytime_map = {
|
|
"dawn": (6, 8),
|
|
"day": (8, 16),
|
|
"dusk": (16, 18),
|
|
"night": (0, 5),
|
|
}
|
|
|
|
@property
|
|
def projection_parameters(self) -> TransverseMercator:
|
|
from .syria import PARAMETERS
|
|
|
|
return PARAMETERS
|